
Visão Geral
O servo driver AC síncrono da série HSD6 adota algoritmo de controle avançado, suporta protocolo convencional como MODBUS, CANOPEN, EtherCAT, resolução de codificador de até 23 bits. resposta de até 3,0 KH.
A resolução do codificador pode ser de até 24 bits, suporta codificador de tipo incremental de 17 bits e absoluto de 17 bits/23 bits/24 bt.
A função STO &Full colse loop é opcional.
Frequência de resposta do loop de velocidade de até 3,1 KHz.
Função sem ajuste, função de autoajuste.
Função de compensação de fricção e folga.
Este servo driver possui tecnologia servo madura e desempenho de custo mais alto.
Parâmetros
|
Item |
Especificações |
||||||||||||||
|
HSD6-DS |
02 |
03 |
06 |
08 |
12 |
15 |
18 |
25 |
32 |
45 |
60 |
75 |
|||
|
panorama |
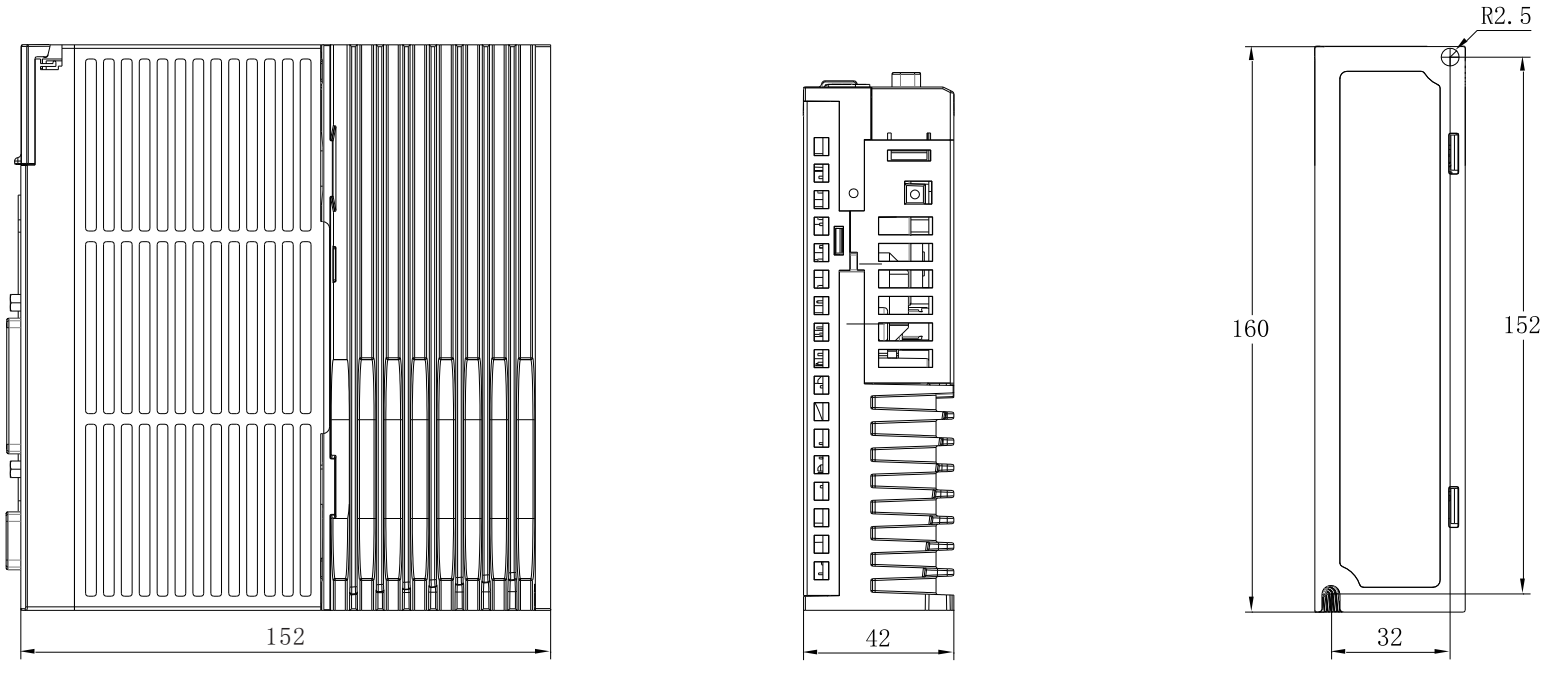
UM(mm) |
32 |
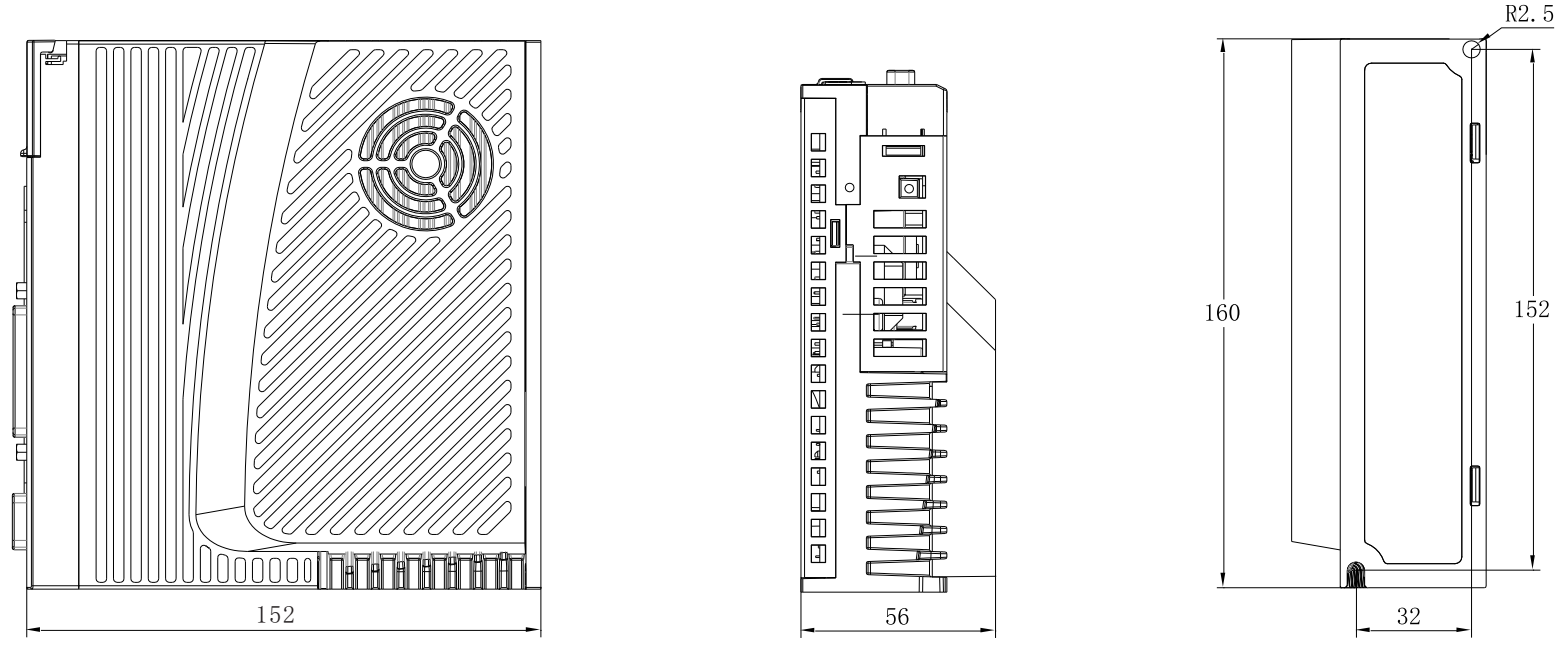
53 |
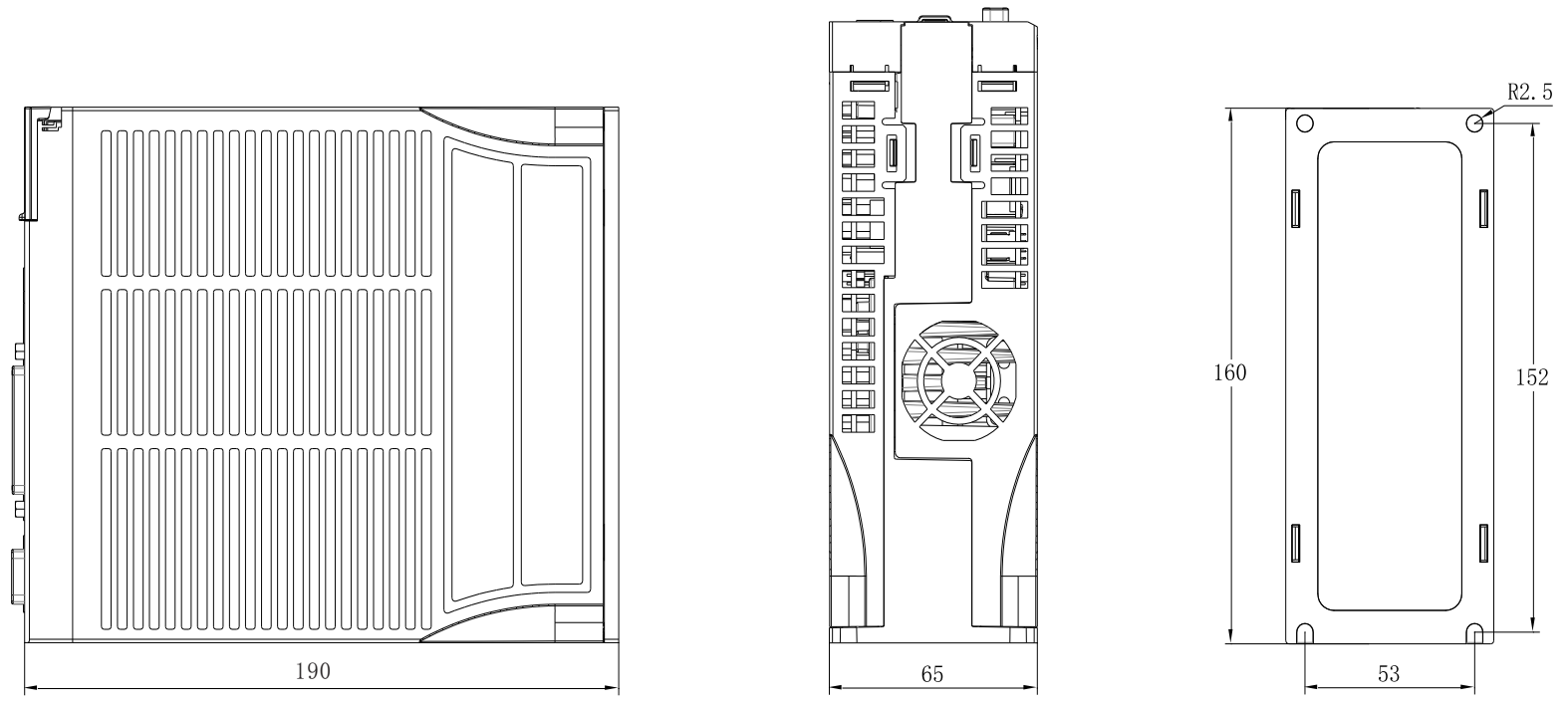
88 |
130 |
190 |
|||||||||
|
B(mm) |
152 |
152 |
248 |
352 |
447 |
||||||||||
|
W(mm) |
148 |
186 |
215 |
215 |
215 |
||||||||||
|
Hum) |
160 |
160 |
258 |
358 |
463 |
||||||||||
|
D(mm) |
42 |
56 |
65 |
110 |
206 |
224 |
|||||||||
|
R(mm) |
2,5 |
2,5 |
2.8 |
3.5 |
3.5 |
||||||||||
|
Peso (kg) |
0,8 |
1,0 |
1,5 |
5.1 |
8.3 |
12 |
|||||||||
|
Potência de entrada |
Monofásico/trifásico AC200V -240V, -15%~10%,50/60 Hz |
AC200V-240V trifásico ,-15%~10%,50/60Hz |
|||||||||||||
|
HSD6-DS |
04 |
06 |
09 |
12 |
17 |
21 |
26 |
32 |
37 |
45 |
60 |
75 |
|||
|
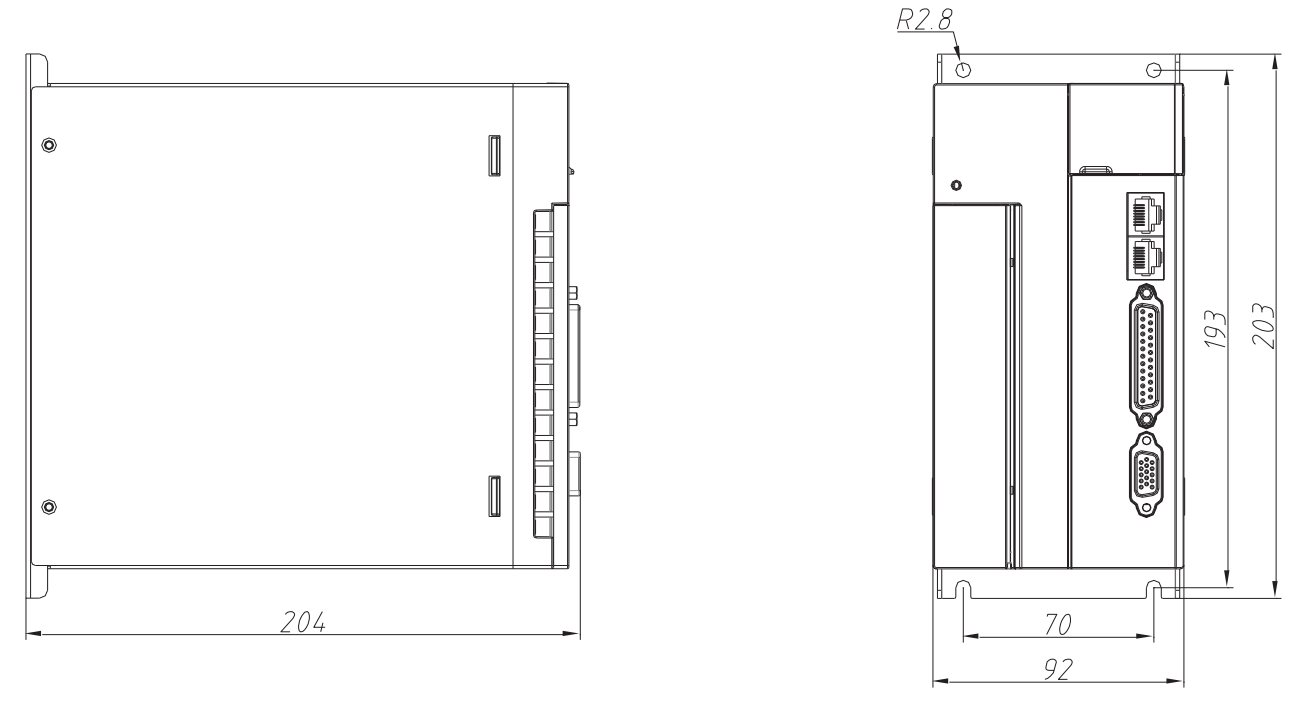
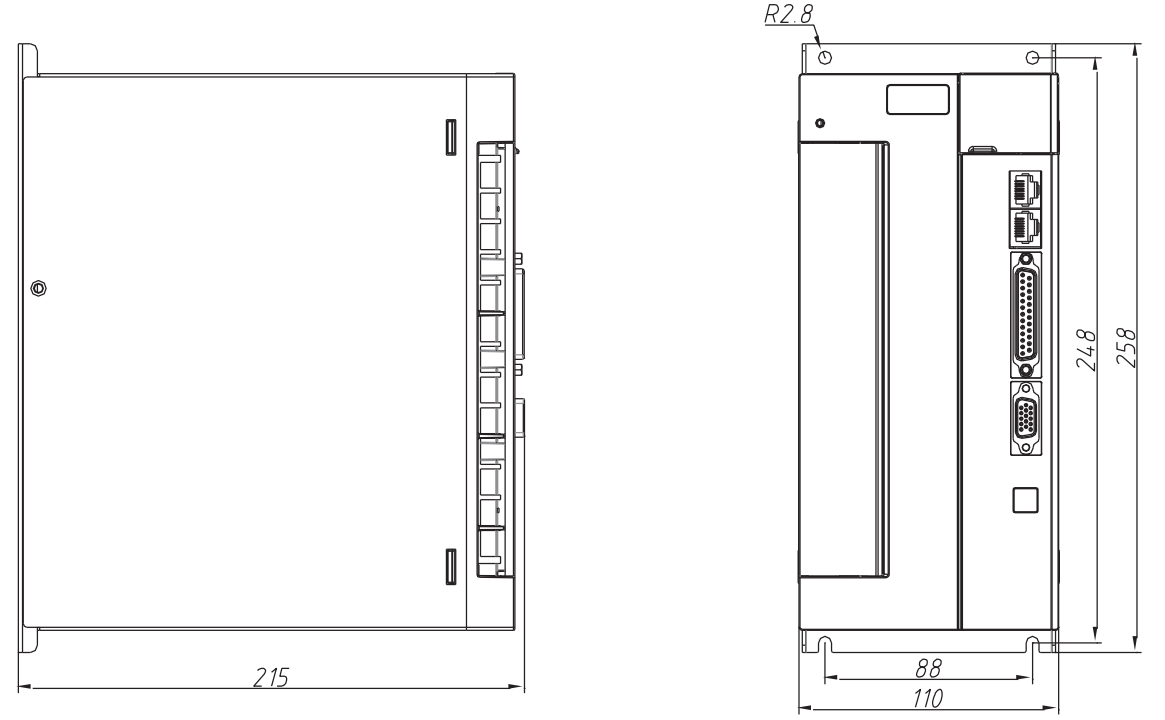
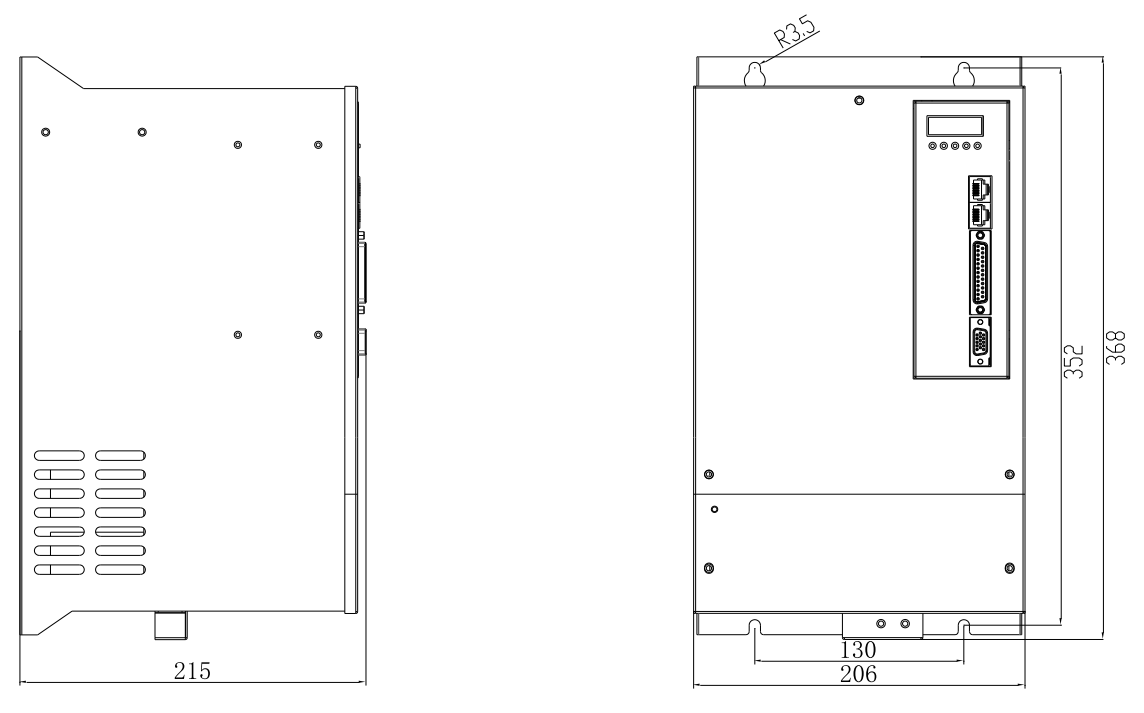
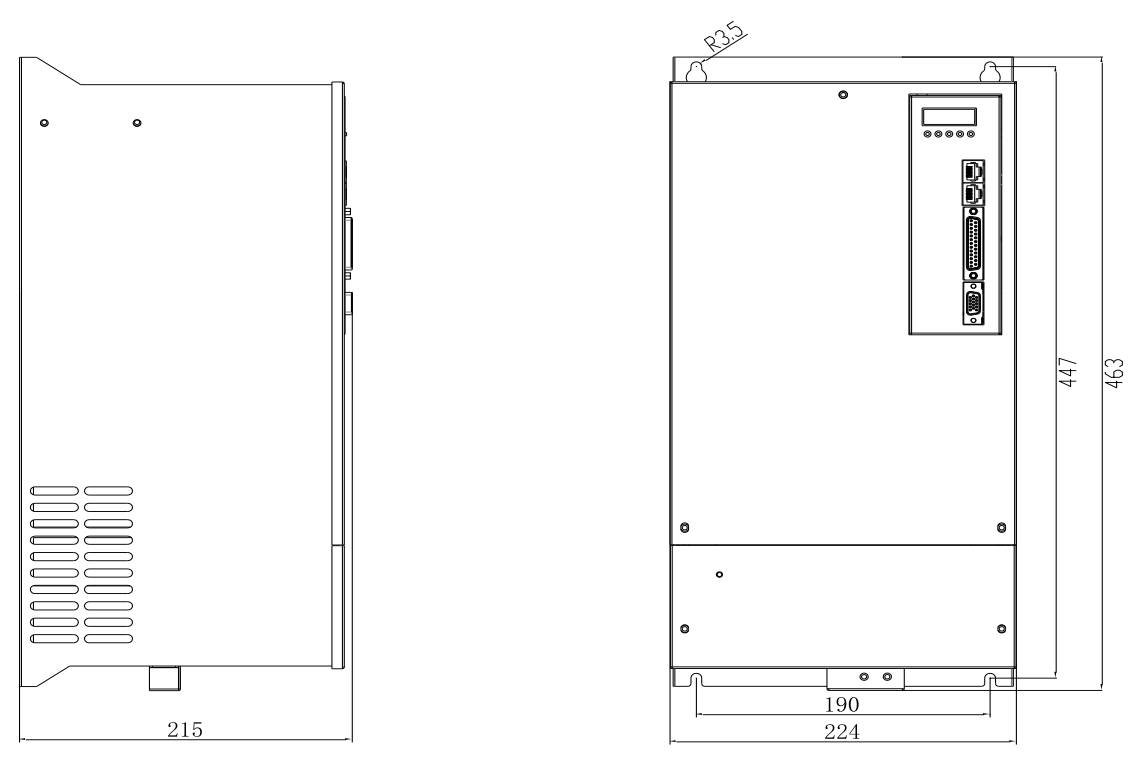
panorama |
UM(mm) |
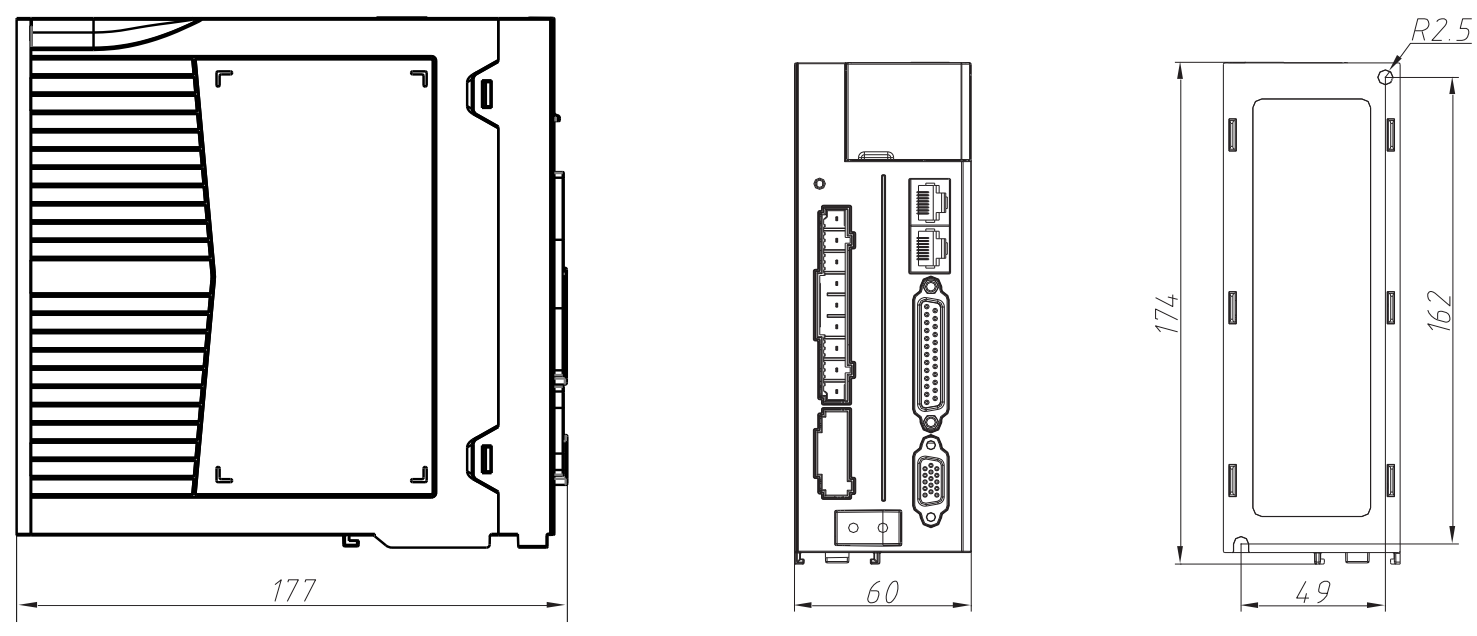
49 |
70 |
88 |
130 |
190 |
|||||||||
|
B(mm) |
162 |
193 |
248 |
352 |
447 |
||||||||||
|
W(mm) |
177 |
204 |
215 |
215 |
215 |
||||||||||
|
Hum) |
174 |
203 |
258 |
368 |
463 |
||||||||||
|
D(mm) |
60 |
92 |
110 |
206 |
224 |
||||||||||
|
R(mm) |
2,5 |
2.8 |
2.8 |
3.5 |
3.5 |
||||||||||
|
Peso (kg) |
1.3 |
2.7 |
5.1 |
8.3 |
12 |
||||||||||
|
Potência de entrada |
AC380V-440V trifásico , -15% ~ 10% , 50/60 Hz |
||||||||||||||
|
Informação básica |
Ambiente |
Temperatura℃ |
Usar ambiente temperatura |
0~+55℃ (diminui se a temperatura ambiente estiver entre 40℃ e 50℃) |
|||||||||||
|
Temperatura do ambiente de armazenamento |
-20 ~ 65°C |
||||||||||||||
|
Umidade |
Usar ambiente umidade |
20~85% RH abaixo (sem condensação) |
|||||||||||||
|
Umidade do ambiente de armazenamento |
20~85% RH abaixo (sem condensação) |
||||||||||||||
|
Use e preserve o ar ambiente |
interior (sem luz solar) 、Sem gás corrosivo, gás inflamável, névoa de óleo, poeira |
||||||||||||||
|
altitude |
Abaixo de 1000m |
||||||||||||||
|
vibração |
5,8 m/s2 (0,6 G) abaixo de 10 ~ 60 Hz (não pode ser usado continuamente na frequência de ressonância) |
||||||||||||||
|
Tensão suportável de isolamento |
Básico-FG entre AC1500V 1min |
||||||||||||||
|
Maneira de controle |
Unidade de onda senoidal do conversor PWM trifásico |
||||||||||||||
|
Feedback do codificador |
1. Tipo incremental de 2500ppr (linha de economia/ linha sem economia) 2. Tipo 17/23 bits (depois de adicionar uma bateria, pode ser usado como absoluto multivoltas) |
||||||||||||||
|
Ao controle sinal |
Entrada |
9 entradas (isolamento do acoplador óptico DC24V ) alternam de acordo com a função do modo de controle |
|||||||||||||
|
Saída |
5 saídas (isolamento de optoacoplador DC24V, saída de coletor aberto ) interruptor de acordo com a função do modo de controle |
||||||||||||||
|
Sinal de pulso |
Entrada |
2 entradas (isolamento de optoacoplador, diferencial RS-422, saída de coletor aberto) |
|||||||||||||
|
Saída |
4 saídas (diferencial RS-422 fase A/B/Z; saída coletor aberto fase Z) |
||||||||||||||
|
Com. função |
RS232 |
Para comunicação com PC (para conexão "Servo Studio") |
|||||||||||||
|
RS-485 |
Para comunicação de controle remoto superior (1:n) |
||||||||||||||
|
PODE |
Comunicação de barramento CANOPEN |
||||||||||||||
|
Função de regeneração |
Resistor regenerativo opcional, resistor regenerativo externo. Preste atenção à modificação dos parâmetros internos |
||||||||||||||
|
Modelo de controle |
6 modos de controle: controle de velocidade, controle de posição, controle de torque , controle de torque/velocidade, controle de velocidade/posição , controle híbrido de torque/posição, torque/velocidade/posição |
||||||||||||||
|
Função |
Entrada de controle |
Redefinição de alarme , comutação de ação proporcional , ativação da função fixa zero , movimento para frente proibido, movimento reverso proibido, limite de torque externo para rotação direta , limite de torque externo para rotação reversa , avanço para frente, avanço reverso , interruptor de reinicialização para frente, interruptor de reinicialização para trás , interruptor de origem, parada de emergência, habilitação de servo, interruptor de ganho |
|||||||||||||
|
Saída de controle |
Servo pronto, motor girando, sinal de velocidade zero, velocidade alcançada, posição alcançada, sinal de aproximação de posicionamento, limite de torque, limite de velocidade, saída de freio, advertência, falha de servo, código de alarme (saída de 3 dígitos) |
||||||||||||||
|
Controle de posição |
Entrada de pulso |
Máximo frequência de pulso de comando |
Entrada diferencial: máximo de alta velocidade 4Mpps, largura de pulso não pode ser inferior a 0,125μs A velocidade baixa máxima é 500Kpps e a largura do pulso não pode ser inferior a 1μs Coletor aberto: máximo 200Kpps, largura de pulso não pode ser inferior a 2,5μs |
||||||||||||
|
Forma de sinal de pulso de entrada |
Entrada diferencial; coletor aberto |
||||||||||||||
|
Método de sinal de pulso de entrada |
Pulso + direção, diferença de fase em ângulo reto (fase A + fase B ), pulso CW + CCW |
||||||||||||||
|
Comando divisão de pulso/ multiplicação (Engrenagem eletrônica configuração de proporção) |
0,1048576 < B/A <419 430,4 |
||||||||||||||
|
Filtro de comando |
Filtro de suavização, filtro FIR |
||||||||||||||
|
Pulso colocado |
Forma de pulso de saída |
Fase A, Fase B: Saída diferencial Fase Z: saída diferencial ou saída de coletor aberto |
|||||||||||||
|
Razão de divisão de frequência |
Divisão de frequência arbitrária |
||||||||||||||
|
Função de pulso de saída |
Pulso de posição do codificador e comando de pulso de posição (pode ser definido) |
||||||||||||||
|
Controle de velocidade |
Entrada de controle |
Servo LIGADO, reinicialização do alarme , comando de velocidade reverso, fixação de velocidade zero, entrada de seleção de comando interno 1, entrada de seleção de comando interno 2, entrada de seleção de comando interno 3, entrada de seleção de comando interno 4, rotação para frente entrada de limite de torque externo, rotação reversa Entrada de limite de torque externo, parada de emergência |
|||||||||||||
|
Saída de controle |
Status de alarme, preparação do servo , liberação do freio, saída de limite de torque, velocidade de saída de limite de velocidade atingida, velocidade consistente, saída de rotação do motor, saída de sinal de velocidade zero |
||||||||||||||
|
Controle de Torque |
Entrada de controle |
Servo ligado, reset de alarme, comando de torque reverso, grampo de velocidade zero |
|||||||||||||
|
Saída de controle |
Status de alarme, preparação do servo , liberação do freio, limite de torque, saída de limite de velocidade, parada de emergência |
||||||||||||||
|
Entrada de comando de torque |
(Configuração padrão de fábrica, o intervalo pode ser definido pelo código de função) |
||||||||||||||
|
Função de limite de velocidade |
Limite de velocidade interno positivo e negativo P03.27, P03.28 |
||||||||||||||
|
Comum |
Função de observador de velocidade |
SIM |
|||||||||||||
|
Função de controle de amortecimento |
SIM |
||||||||||||||
|
Filtro de entalhe adaptativo |
SIM |
||||||||||||||
|
Função de ajuste automático |
SIM |
||||||||||||||
|
Saída do codificador divisão de frequência |
SIM |
||||||||||||||
|
Função de planejamento de localização interna |
SIM |
||||||||||||||
|
Ajustamento/ configuração de função |
Use o software de configuração do computador host "Serv o studio" para ajustar |
||||||||||||||
|
Proteção |
Sobretensão , fonte de alimentação anormal, sobrecorrente, sobrecarga, codificador anormal, excesso de velocidade, desvio excessivo de posição, parâmetros anormais , etc. |
||||||||||||||
Para parâmetros mais detalhados, baixe a amostra.
Características
1. Função sem ajuste
2. A resposta de velocidade é bastante melhorada
3. Suporta vários tipos de codificador
4. Função de frenagem dinâmica
5. Função de supressão de vibração
6. Suporta múltiplas interfaces de comunicação para obter controle de alta velocidade e alta precisão
Dimensões
Download
| Series | Modelo | Download |
| Servo Drive | Catálogo de sistema servo de alto desempenho da série HSD6 V2.1 | |
| Servo Drive | Manual do usuário do servo drive série HSD6 versão-V2.2 | |
| Servo Drive | Software de comissionamento HSD6_V1.0 |