
Visão Geral
O HSD2000 tem desempenho perfeito graças ao DSP de 64 bits, FPGA de alto desempenho e ao mais novo algoritmo de controle de motor. Ele poderia acionar servo motor síncrono e servo motor assíncrono, bem como motores de indução. Disponível para pulso / analógico / barramento de campo / sinal de entrada digital / controle de teclado e suporta todos os tipos de codificadores, incluindo incremental, SinCos, absoluto. A faixa de potência é de 2,2KW a 132KW.
A unidade de servoacionamento de fuso CA digital HSV-180AS usa a mais recente tecnologia, como processador de sinal digital (DSP) para controle de movimento e módulo de potência inteligente (IPM) para obter um servocontrole de circuito fechado de posição, velocidade e torque para CA de ímã permanente servomotores síncronos. A unidade de servoacionamento de fuso CA digital HSV-180AD fornece funções de proteção para curto-circuito, sobrecorrente, sobretensão, subtensão, sobrecarga, superaquecimento e bomba. Ele integra interface de comunicação, interface de entrada de pulso, interface de entrada analógica e display digital de depuração de teclado pequeno.
Parâmetros
|
Item |
Descrição do item |
|
|
Entrada |
Tensão nominal; frequência |
Trifásico, 380V ~ 480V; 50Hz/60Hz; taxa de desequilíbrio de tensão: < 3 %; frequência: ± 5 % |
|
Saída |
Frequência nominal |
380V , 400V , 415V , 440V , 460V , 480V |
|
Frequência |
0 Hz ~ 1000 Hz |
|
|
Sobrecarga |
G: 150 % da corrente nominal em 2 minutos , 200 % da corrente nominal em 0,5 segundos |
|
|
Desempenho do controle principal |
Ao controle |
controle vetorial de fluxo magnético sem PG, controle vetorial de fluxo magnético com PG, controle servo, controle V/F, controle V/F com PG |
|
Método de modulação |
Método de modulação PWM de vetor espacial |
|
|
Faixa de velocidade |
1: 200 (controle vetorial de fluxo magnético sem PG), 1: 5000 (controle vetorial de fluxo magnético com PG, controle servo) |
|
|
Torque inicial |
0Hz de 150 % de torque nominal (controle vetorial de fluxo magnético sem PG), 0Hz de 200 % de torque nominal (controle vetorial de fluxo magnético com PG) |
|
|
Precisão de status estável da velocidade de rotação operacional |
≤±0,2 % velocidade de rotação síncrona nominal (controle vetorial de fluxo magnético sem PG), ≤±0,02 % velocidade rotacional síncrona nominal (controle vetorial de fluxo magnético com PG, servocontrole) |
|
|
Flutuações de velocidade |
≤±0,3 % velocidade rotacional síncrona nominal (controle vetorial de fluxo magnético sem PG) ≤±0,1 % velocidade rotacional síncrona nominal (controle vetorial de fluxo magnético com PG , controle servo) |
|
|
Precisão de posicionamento |
±1 pulso |
|
|
Resposta de torque |
≤10ms (controle vetorial de fluxo magnético com PG, servocontrole); ≤20ms (controle vetorial de fluxo magnético sem PG) |
|
|
Controle de torque |
Suporta controle vetorial de fluxo magnético sem PG, controle vetorial de fluxo magnético com PG, controle servo |
|
|
Precisão de frequência |
Configuração digital: frequência máxima×±0,01 % ; configuração analógica: frequência máxima × ± 0,2 % |
|
|
Resolução de frequência |
configuração digital: 0,01 Hz; configuração analógica: frequência máxima×0,05 % |
|
|
Levantamento de torque |
Levantamento de torque automático, levantamento de torque manual 0,1 %~30,0 % |
|
|
Curva V/F |
Quatro tipos: uma curva V/F de configuração do usuário e 3 curvas de torque reduzidas (2,0 vezes a potência, 1,7 vezes a potência, 1,2 vezes a potência) |
|
|
Curvas de aceleração e desaceleração |
Dois tipos: aceleração e desaceleração direta, aceleração e desaceleração da curva S; tempo dos quatro tipos: Unidades de tempo (minutos/segundos) opcionais, máximo de 60 horas |
|
|
Frenagem CC |
Frequência de partida do freio CC de parada: 0,00 Hz ~ 60,00 Hz; tempo de frenagem: 0,0s ~ 30,0s; corrente de freio: 0,0 %~100,0 % |
|
|
Regulação Automática de Tensão (AVR) |
Quando a tensão da rede muda, a tensão de saída mantém-se constante automaticamente. |
|
|
Limitação automática de corrente |
Limite a corrente em operação automaticamente para evitar disparos freqüentes por falha de sobrecorrente. |
|
|
Ajuste automático de onda portadora |
De acordo com as características de carregamento, a frequência da onda portadora pode ser ajustada automaticamente; opcional |
|
|
Capacidades de personalização |
Frequência de oscilação têxtil |
Controle de frequência de oscilação têxtil, alcança função de frequência de oscilação ajustável da frequência central |
|
Função de ligação |
Bandas livres e comutação síncrona podem ser implementadas entre o canal de comando e um determinado canal de frequência. |
|
|
Avançando |
Faixa de frequência de avanço: 0,00 Hz ~ 50,00 Hz; tempo de aceleração e desaceleração gradual de 0,1s a 60,0s pode ser o melhor; intervalo de avanço pode ser se |
|
|
Operação em várias velocidades |
A operação em múltiplas velocidades será obtida por meio de PLC interno ou terminais de controle. |
|
|
controle de circuito fechado de processo integrado |
Forme um sistema de controle de malha fechada |
|
|
Função de operação |
Canal de comando de operação |
Dado painel de operação, terminal de controle e pode ser alternado por vários métodos. |
|
Dado canal de frequência |
Dada a tensão digital, analógica, a corrente analógica, o pulso, a porta serial pode ser comutada por vários métodos. |
|
|
Dada frequência auxiliar |
Obtenha ajuste fino de frequência auxiliar flexível e síntese de frequência |
|
|
Terminal de saída de pulso |
Saída de sinal de onda quadrada de pulso de 0 ~ 100kHz, alcança saída de frequência de configuração, frequência de saída. |
|
|
Terminal de saída analógica |
2 saídas de sinais analógicos, 0/4 ~ 20 mA ou 0/2 ~ 10 V podem ser selecionadas separadamente. Obtenha a saída da frequência de configuração, frequência de saída. |
|
|
Painel de operacoes |
Visor LED |
Exibir 20 tipos de parâmetros, como frequência de configuração, frequência de saída, tensão de saída e corrente de saída. |
|
tela de LCD |
Opcional, conteúdo de prompts em chinês/inglês |
|
|
Cópia de parâmetro |
O painel de operação pode ser usado para obter cópia rápida dos parâmetros |
|
|
Bloqueio de teclas e seleção de funções |
Obtenha peças ou todas as funções de bloqueio das teclas. Defina a faixa de função da chave da peça para evitar erros de operação. |
|
|
Função protetora |
proteção de falta de fase (opcional), proteção contra sobrecorrente, proteção contra sobretensão, proteção contra falta de tensão, proteção térmica excessiva, proteção contra sobrecarga, proteção contra carga |
|
|
Ambiente |
Doença |
Interior, sem luz solar, poeira, gases corrosivos, gases inflamáveis, névoa, vapor de água, gotejamento ou sal. |
|
Altura da altitude |
Desclassificação acima de 1000 metros, desclassificação de 10 % em cada elevação de 1000 metros |
|
|
Temperatura ambiente |
-10 ℃ ~+ 40 ℃ (temperatura ambiente entre 40 ℃ ~50 ℃ , desclassificação) |
|
|
Ambiente |
Umidade |
5 %~95 %UR, sem condensação |
|
Vibração |
Menos de 5,9m/s 2 (0,6g) |
|
|
Temperatura de armazenamento |
-40 ° C ~+ 70 °C |
|
|
Estrutura |
Grau de proteção |
IP20 |
|
Método de resfriamento |
Refrigerado a ar com controle de ventilador |
|
| Modelo de Servo Drive | Capacidade Nominal (kVA) | Corrente de entrada nominal (A) | Corrente de saída nominal (A) | Motor adaptativo (kW) |
| HSD2000-4T-1R5 | 3 | 5 | 3.7 | 1,5 |
| HSD2000-4T-2R2 | 4 | 5.8 | 5 | 2.2 |
| HSD2000-4T-004 | 6.3 | 10 | 9 | 4 |
| HSD2000-4T-5R5 | 8,5 | 15,5 | 13 | 5.5 |
| HSD2000-4T-7R5 | 11 | 20,5 | 17 | 7,5 |
| HSD2000-4T-011 | 17 | 26 | 25 | 11 |
| HSD2000-4T-015 | 21 | 35 | 32 | 15 |
| HSD2000-4T-018 | 24 | 38,5 | 37 | 18,5 |
| HSD2000-4T-022 | 30 | 46,5 | 45 | 22 |
| HSD2000-4T-030 | 40 | 62 | 60 | 30 |
| HSD2000-4T-037 | 50 | 76 | 75 | 37 |
| HSD2000-4T-045 | 60 | 92 | 90 | 45 |
| HSD2000-4T-055 | 72 | 113 | 110 | 55 |
| HSD2000-4T-075 | 100 | 157 | 152 | 75 |
| HSD2000-4T-090 | 116 | 180 | 176 | 90 |
| HSD2000-4T-110 | 138 | 214 | 210 | 110 |
| HSD2000-4T-132 | 167 | 256 | 253 | 132 |
| HSD2000-4T-160 | 200 | 307 | 304 | 160 |
| HSD2000-4T-185 | 230 | 355 | 350 | 185 |
| HSD2000-4T-200 | 250 | 385 | 380 | 200 |
| HSD2000-4T-220 | 280 | 430 | 426 | 220 |
| HSD2000-4T-250 | 309 | 488 | 470 | 250 |
| HSD2000-4T-280 | 342 | 525 | 520 | 280 |
| HSD2000-4T-315 | 388 | 605 | 590 | 315 |
| HSD2000-4T-355 | 427 | 667 | 650 | 355 |
| HSD2000-4T-400 | 454 | 701 | 690 | 400 |
| HSD2000-4T-450 | 510 | 789 | 775 | 450 |
| HSD2000-4T-500 | 566 | 877 | 860 | 500 |
| HSD2000-4T-560 | 625 | 982 | 950 | 560 |
| HSD2000-4T-630 | 724 | 1184 | 1100 | 630 |
| HSD2000-4T-800 | 921 | 1500 | 1400 | 800 |
Características
1. DSP + FPGA empregado, confiabilidade e desempenho melhorados acentuadamente Alto desempenho /
Alta flexibilidade/forte capacidade de sobrecarga
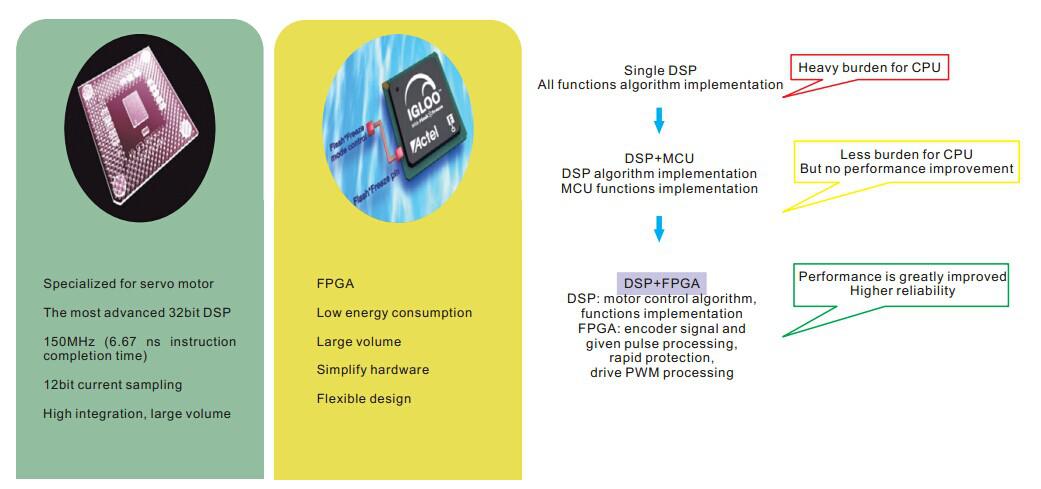
2. Funciona perfeitamente como servo acionamento síncrono AC e servo acionamento assíncrono, pode conduzir:
servo motor síncrono (controle de posição), servo motor assíncrono e motores de indução.
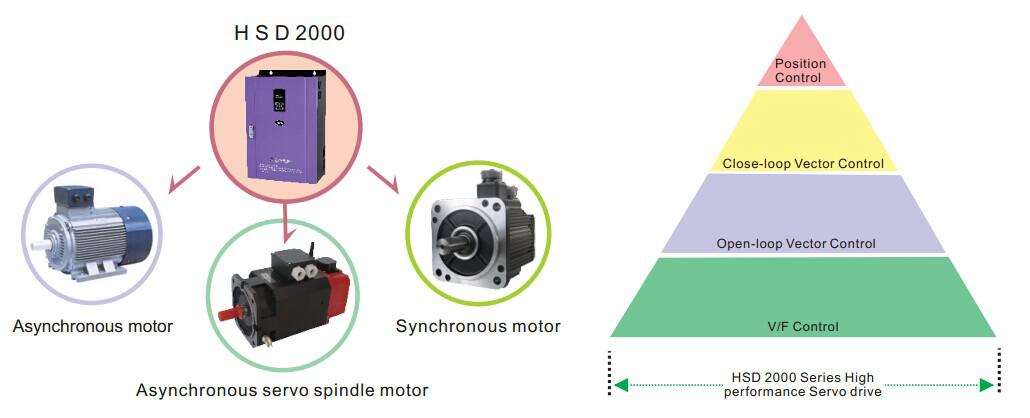
3. Modo de velocidade / modo de torque / modo servo / modo de acionamento do fuso opcional
A. Modo de velocidade
Loop aberto: Para a maioria das aplicações, como guindastes, fuso CNC
Loop fechado: Para as aplicações que exigem maior precisão de velocidade, por exemplo, elevadores, guindastes portuários:
B Modo de torque:
Loop aberto: Aplicações gerais de enrolamento, por exemplo, enrolamento de couro, enrolamento de filme.
Loop fechado: Aplicações de enrolamento requerem alta precisão de tensão, com cálculo de diâmetro de enrolamento, por exemplo, enrolamento de painel de aço.
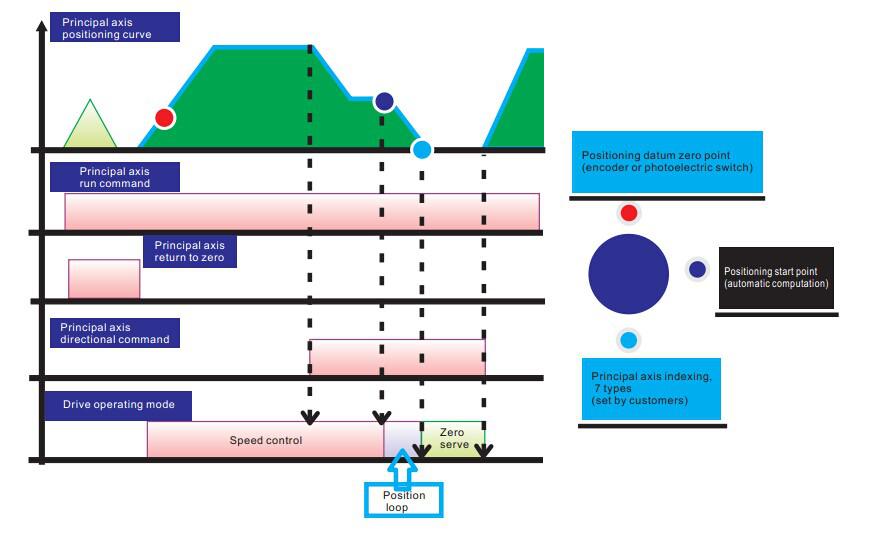
C. Modo servo:
Rastreamento de pulso: Geralmente co-trabalha com controlador CNC ou outro computador superior
Posicionamento: Posicionamento do fuso CNC, posicionamento digital interno.
D. Modo fuso.
4. Giro automático do ângulo do pólo do servo motor síncrono, sem necessidade de zerar, combina facilmente com todas as marcas de servo motor
5. Operação fácil: controle de pulso / controle de barramento arquivado / controle IO / controle analógico
6. No modo servo, a precisão de posicionamento é menor do que ±1 pulso
7. Controle vetorial de circuito fechado, relação de velocidade é de até 1:5000, pode alcançar precisão de alta velocidade
8. Controle de compartilhamento de tempo de 2 motores com parâmetros diferentes
Dimensões
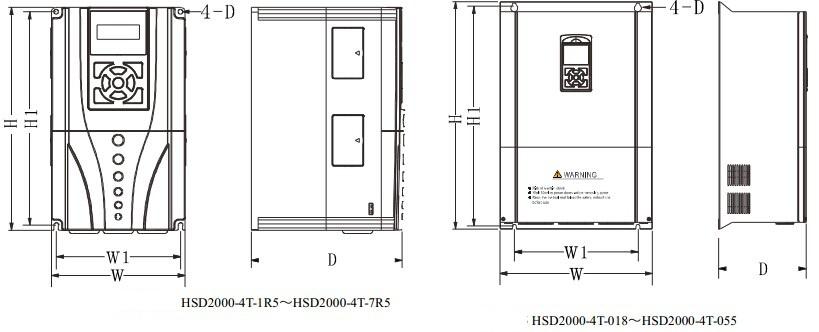
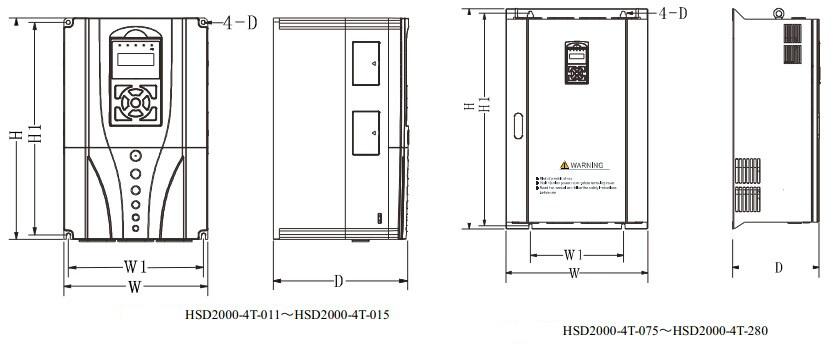
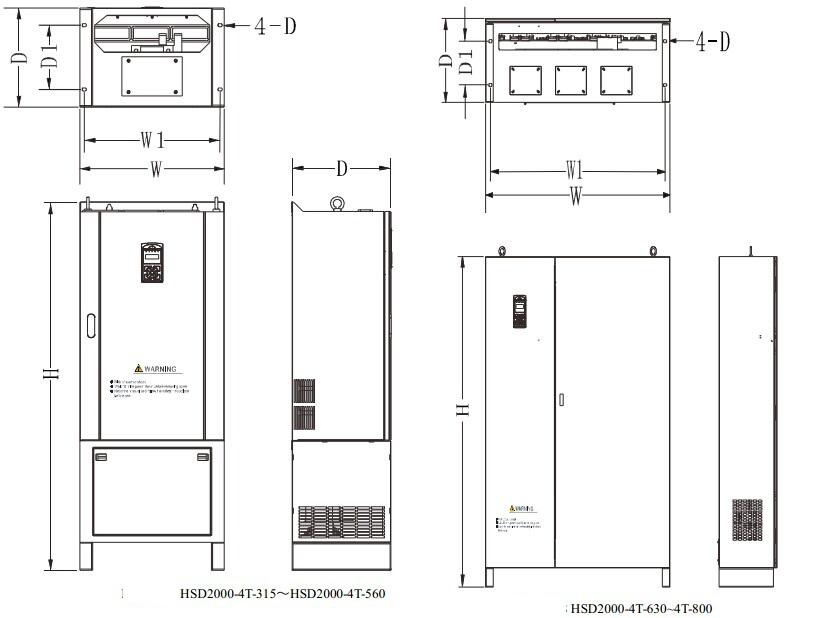
| Modelo de servoacionamento | D | W1 | H1 | H | C | Desenho de esboço nº. | Diâmetro do furo de instalação | Peso bruto (kg) | Método de instalação |
| HSD2000-4T-1R5 | 175 | 127 | 200 | 215 | 140 | Figura 2-3 | 5 | 3.5 | Pendurado |
| HSD2000-4T-2R2 | |||||||||
| HSD2000-4T-004 | |||||||||
| HSD2000-4T-5R5 | 181 | 146 | 251 | 262 | 157 | Figura 2-3 | 5.5 | 5 | Pendurado |
| HSD2000-4T-7R5 | |||||||||
| HSD2000-4T-011 | 181 | 180 | 288 | 305 | 198 | Figura 2-4 | 5.5 | 8 | Pendurado |
| HSD2000-4T-015 | |||||||||
| HSD2000-4T-018 | 220 | 230 | 424,5 | 438 | 276 | Figura 2-5 | 7 | 18 | Pendurado |
| HSD2000-4T-022 | |||||||||
| HSD2000-4T-030 | |||||||||
| HSD2000-4T-037 | 231,5 | 320 | 571 | 589 | 395 | Figura 2-5 | 10 | 45 | Pendurado |
| HSD2000-4T-045 | |||||||||
| HSD2000-4T-055 | |||||||||
| HSD2000-4T-075 | 298 | 320 | 733 | 759 | 489 | Figura 2-6 | 12 | 75 | Pendurado |
| HSD2000-4T-090 | |||||||||
| HSD2000-4T-110 | |||||||||
| HSD2000-4T-132 | 370 | 320 | 898 | 927 | 539 | Figura 2-6 | 12 | 125 | Pendurado e armário |
| HSD2000-4T-160 | |||||||||
| HSD2000-4T-185 | 507 | 898 | 1377 | 539 | Figura 2-6 | 142 | |||
| HSD2000-4T-200 | |||||||||
| HSD2000-4T-220 | 373 | 280 | 1022 | 1054 | 704 | Figura 2-6 | 12 | 160 | Pendurado e armário |
| HSD2000-4T-250 | 672 | 1022 | 1500 | 704 | Figura 2-6 | 181 | |||
| HSD2000-4T-280 |
Download
| Series | Modelo | Download |
| Servo Drive | Manual do usuário do servo-drive HSD2000 AC380V | |
| Servo Drive | Catálogo HSD2000 |